May 2025
Rivian
Robotics Intern
Building robots and vision systems
|
Sai Rohit Muralikrishnan I am a first-year graduate student at the University of Illinois Urbana-Champaign, majoring in Autonomy and Robotics. Previously, I worked as a Machine Learning Engineer at CapeStart, developing text summarization pipelines for medical research articles using large language models like GPT-4 and LangChain. I received my Bachelor's degree in Mechanical Engineering from Vellore Institute of Technology, where I was advised by Professor Arockia Selvakumar Arockia Doss . My research interests lie in the intersection of machine learning, robotics, and computer vision, focusing on developing deployable autonomous systems. |

|
Robotics Intern
Building robots and vision systems

MEng Robotics and Autonomy
Entered UIUC as a graduate robotics student specializing in AI and perception.

Associate Software Engineer - Machine Learning
Optimized data collection and developed a pipeline for medical research summaries using GPT models, improving accuracy and standardization in a GenAI-based literature review tool.

Graduation!!!
Graduated from VIT with a B.Tech in Mechanical Engineering.
Automation Intern
Part of the industrial Automation division that manufactures low-cost and special-purpose machines.

Mitacs Globalink Research Intern
Collaborated with Professors Christopher Henry, Michael Beck, and Christopher Bidinosti on digital agriculture, optimizing a server portal, enhancing GUI, and applying power law for model accuracy.
Summer Research Intern
Collaborated with Prof. Shridevi S on algorithms for lane detection and autonomous driving.

Intern
Interned at TVS Training and Services Limited, contributing to vehicle assembly, engine dismantling, and vehicle systems.
B.Tech Mechanical Engineering
Entered VIT as an undergraduate student majoring in mechanical engineering.
Developed core simulation infrastructure for the GEMstack autonomous vehicle platform as part of the CS588 Simulation Group. Developed a YAML-based Gazebo simulation framework for GEMstack, enabling dynamic scenario creation and realistic 3D environments to test the full perception, planning, and control stack.
A take on finding 6 Degrees of Freedom which a robot arm can use to pick up an industrial warehouse part using computer vision.
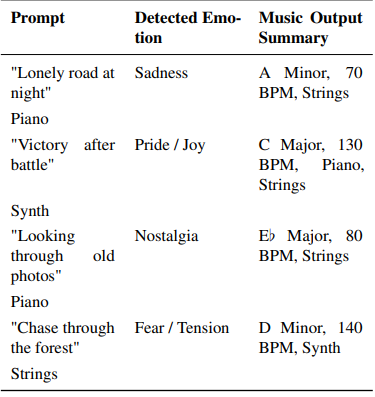
This project implements an Emotion-Aware Music Generator (EAMG) that turns natural-language prompts into emotion-aligned music in real time. It uses a LoRA-tuned DistilBERT to classify emotions, maps them to musical parameters using music theory, and generates MIDI via a transformer model with KV caching for low-latency output.
Developed a vision-guided system in AirSim for drone racing, featuring minimum snap trajectory generation with spline interpolation. Implemented MPC for planar control and PID for elevation to ensure precise gate navigation and real-time adjustments.
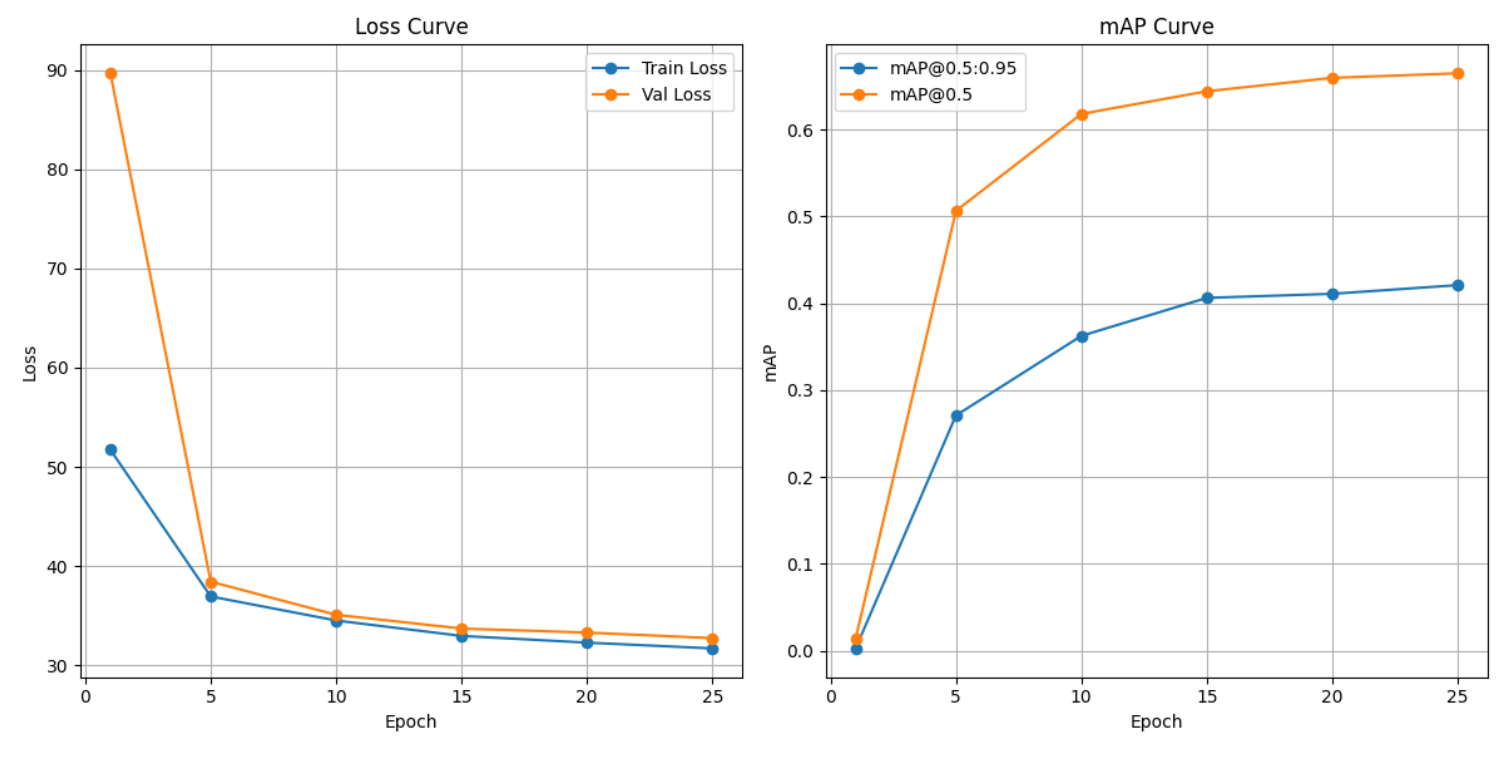
Integrated advanced VLMs like SpatialBot with multi-camera setups to enhance autonomous driving decisions. Developed pipelines for object tracking (YOLOv8, SAM2) and ego-vehicle motion estimation (optical flow, depth mapping), optimizing real-time navigation in dynamic environments.
Implemented a ROS-based framework integrating OpenCV for contour detection, coordinate transformations for workspace mapping, and motion planning (MoveJ and MoveL) to replicate images with high precision.
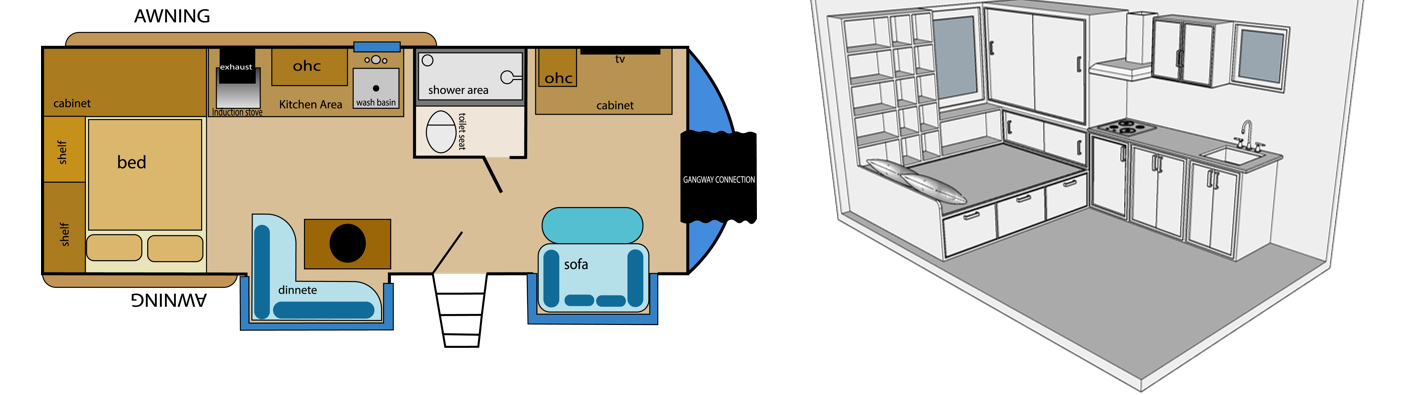
Ideated an autonomous caravan solution incorporating LIDAR, RADAR, GPS, and biometric security to enhance safety and automation. Designed a dual-energy system and space-saving amenities for off-grid travel, earning finalist recognition among 30,000+ participants in the Techgium 2021 competition.
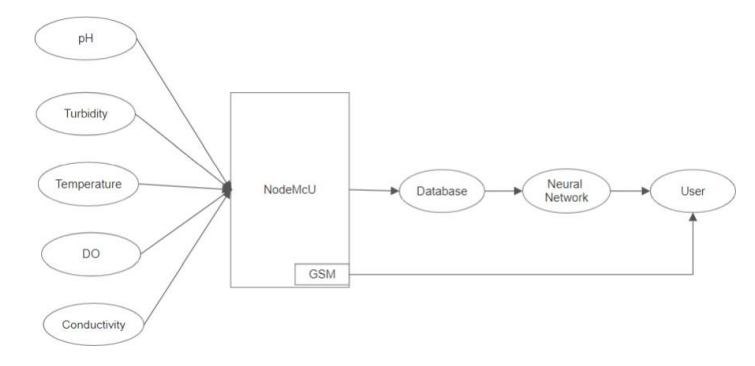
Developed an IoT system using pH, temperature, and conductivity sensors with neural networks to monitor and predict water quality in real time, achieving 88% accuracy and enabling proactive measures for household and environmental applications through cloud integration.
Research Articles |
|
Speed Controlled Lane Switching Embedded Mechanism
Sai Rohit Muralikrishnan, Kalaipriyan Ramalingam, Sarvesh Krishnan, S Shridevi i'PACT'2021 IEEE Xplore Link The paper presents an embedded mechanism that uses computer vision and Arduino to assist drivers in switching lanes based on vehicle speed, aiming to enhance road safety and prevent accidents. |
|
Neuro-Mechanical AI fusion: A paradigm of wearable assistance for cervical impairments
Sai Rohit Muralikrishnan, Manish S. Kumar, R. Kalaipriyan, Arockia Selvakumar Arockia Doss RIACT'23 AIP Publication Link The paper introduces a dynamic wearable assistive cervical collar that uses AI and sensors to monitor neck movements, providing personalized support for people with neck impairments to improve mobility, posture, and recovery. |

Python

PyTorch

TensorFlow
C++

Git

Azure

OpenCV

Langchain

LlamaIndex

Gazebo

ROS
Keras
Reinforcement Learning

SolidWorks
MATLAB

Airsim